The purpose of the gison3dmap system calibration, is to make sure that the projected geographical information, will match as exactly as possible, with the geographical entities visible on the 3D map.
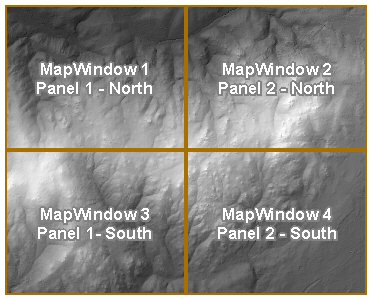
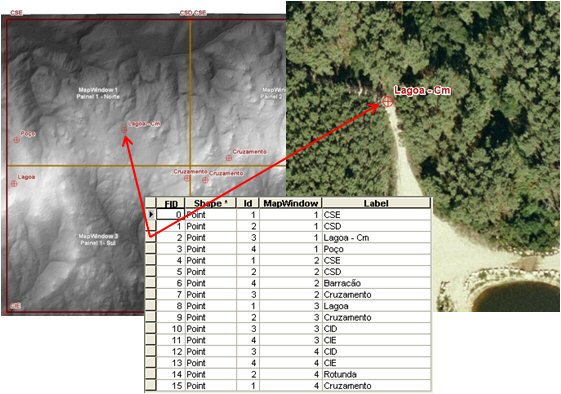
As a starting point to the gison3dmap system calibration, it is required to define, using two shapefiles, which is the 3D map area, or map window, to allocate to each video projector (next image on the left), and for each map window, which are the coordinates of the calibration points that will be used (next image on the right).
|
|
Map Windows |
Calibration Points |
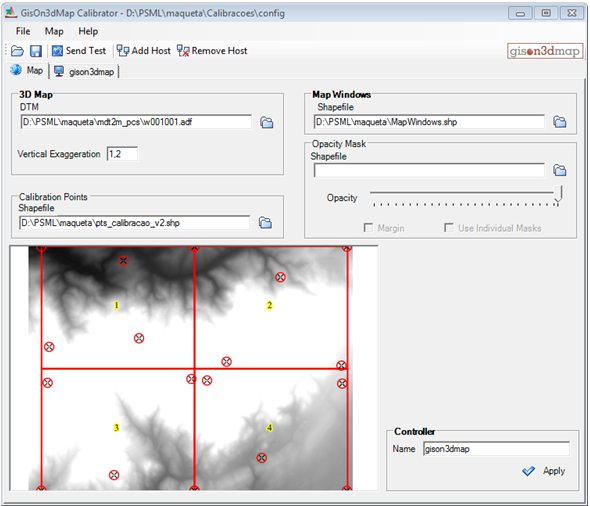
The gison3dmap calibrator interface has two tabs: Map and Hosts.
The Map tab is used to define map parameters that apply to the system as a whole.
These include the DTM used to produce the 3D map, the vertical scale exaggeration, the map windows shapefile, and calibration points shapefile.
When required to deal with non rectangular 3D maps, or irregular map windows layouts, it will be necessary to define a mask shapefile, to black out outside and overlapping projection areas.
Hosts are added to the gison3dmap system using the Map tab.
For each host added running the Display component, gison3dmap will detect existing graphic video outputs, which will be shown in separate tabs, within the corresponding host tab.
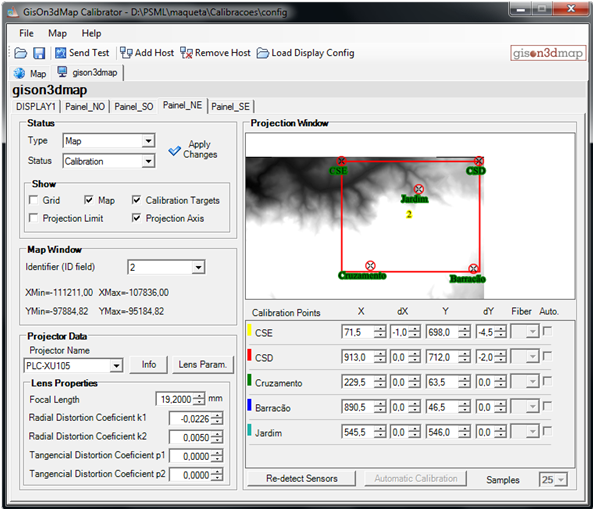
Each Display associated with a projector used by the system, will be of type "Map" and will be assigned to a specific MapWindow.
The calibration is made using the Calibration Status mode, and it is initiated with the selection of the video projector in use and the definition of its lenses characteristics.
For each calibration point available for the selected map window, the corresponding calibration target needs to be displaced to its correct location on the 3D map surface.
Once this process is concluded for each calibration point, it wil be possible to project a grid that will certify the existance of a calibration solution. It will then be possible to project geographic data adequate to validatte and refine the calibration, such as the road network.
At the end of the calibration process, each map display status mode will be changed to Projection, the changes applied and the calibration saved. The system will then be ready to accept gison3dmap projection commands.
Displays can also be defined as type Multimedia. In this case, the corresponding graphic output will be connected to an external screen or projector, and used to show images and videos synchronized with the projection of geographical data on top of the 3D map.
|